Bisnis.com, JAKARTA - BMW Motorrad menggandeng Bosch untuk mengembangkan Active Cruise Control (ACC) pada sepeda motor, untuk kenyamanan maksimal dan keamanan terbaik saat mengendarai sepeda motor.
Active Cruise Control (ACC) memungkinkan pengendara tidak perlu secara manual beradaptasi dengan kecepatan laju mengemudi kendaraan di depan.
Sistem kontrol jarak berkendara aktif tersebut sudah tersedia di mobil sejak bertahun-tahun, akan tetapi tidak standar di sepeda motor hingga saat ini.
Dengan pengalaman bertahun-tahun dengan sistem bantuan pengemudi mobil penumpang dari BMW dan Bosch, ACC dapat diterapkan secara selektif dan digunakan untuk aplikasi sepeda motor.
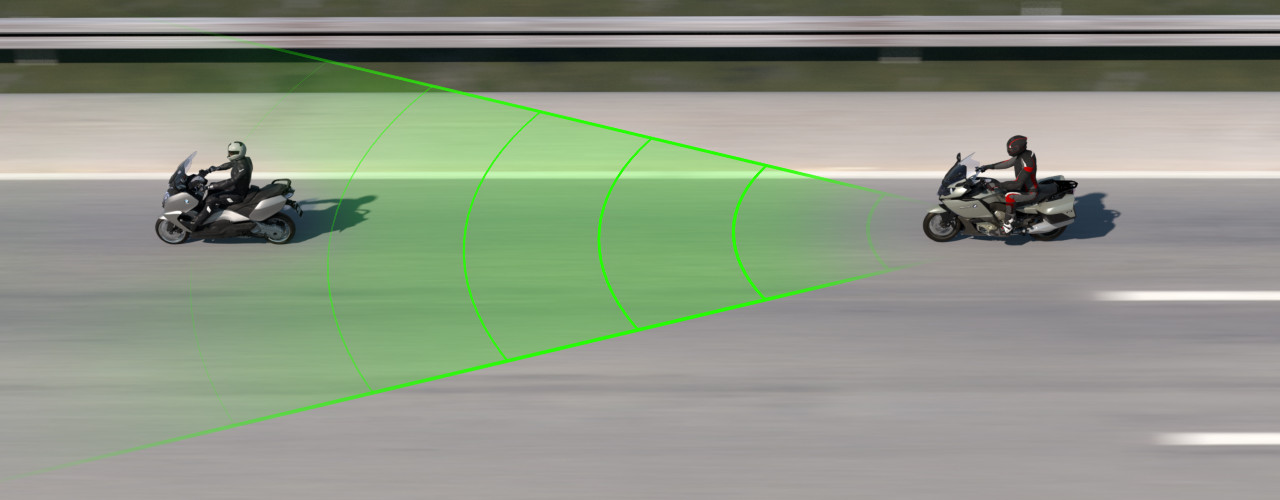
ACC baru ini memberikan kenyamanan maksimum untuk pengendara sepeda motor touring yang menuntut dengan secara otomatis mengatur kecepatan yang ditetapkan oleh pengendara dan jarak ke kendaraan yang mengemudi di depan.
Sistem secara otomatis mengatur kecepatan kendaraan ketika jarak ke kendaraan di depan dikurangi dan menjaga jarak yang ditentukan oleh pengendara.
Baca Juga
Jarak ini bisa bervariasi dalam tiga tahap. Baik kecepatan berkendara maupun jarak ke kendaraan di depan dapat diatur dengan nyaman menggunakan tombol. Pengaturan individual ditampilkan pada kelompok instrumen TFT.
BMW Motorrad ACC baru memiliki dua karakteristik kontrol yang dapat dipilih: nyaman atau dinamis, di mana perilaku akselerasi dan deselerasi berubah sesuai. Kontrol jarak juga dapat dinonaktifkan agar dapat menggunakan Dynamic Cruise Control (DCC).
Saat menikung, kecepatan secara otomatis dikurangi oleh ACC jika diperlukan dan sudut lean yang nyaman ditujukan. Namun, dengan sudut kemiringan yang meningkat, dinamika pengereman dan akselerasi terbatas untuk mempertahankan kemampuan berkendara yang stabil dan tidak mengganggu ketenangan pengendara dengan pengereman atau akselerasi yang mendadak.
BMW Motorrad ACC adalah sistem bantuan pengendara yang meninggalkan tanggung jawab bersama pengendara dan memungkinkannya untuk melakukan intervensi setiap saat. Itu juga karena ACC baru hanya merespons kendaraan yang bergerak.
Kendaraan statis - seperti di ujung kemacetan atau lampu lalu lintas - tidak dipertimbangkan. Dalam kasus seperti itu, pengendara harus melakukan pengereman.